目次
オートマタ2号機の制作

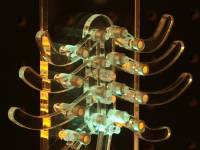
材料にアクリル板を使って作った自転車をこぐオートマタは、レーザー加工機と3Dプリンタを使って比較的簡単に作ることができ、LEDの電飾を組み合わせると透明アクリルの縁が光ってさらに魅力が増します。今回はアクリルのオートマタの第二弾を作りました。
8本足のクモ、エイリアンの幼生といったイメージですが、動きはイソギンチャクといったところでしょうか。
前回オートマタ作成からのフィードバック
(前作の記事)
- 動くパーツの軸の間の寸法がかなりシビアで、基本構造は変えていないのに、ちょっと長さを変えるだけで3DCADソフトのシミュレーションの動きがおかしくなったり、動かなくなったりしました。
また、シミュレーションで問題なく動いていても、そのままに実物が動くわけでもありません。部品同士のガタつき、使用するモーターの動作/特性、素材の重さ、部品にかかる重力など、シミュレーションに織り込まれていない色々な要素が働いてくるためです。
バリエーションを増やしたくても、設計変更は結構大変だと感じました。
- 3Dプリントで回転軸やストッパーの部品を作ると、その精度がばらつきがちという結構大きな欠点があります。部品が小さいと、なおさらその影響が大きくなります。
モデル全体の大きさから回転軸の太さをΦ3.0mmとして設計しましたが、3Dプリントで一般的な積層厚0.2mmで出力したΦ3mmのシャフトは、表面に積層の凸凹が結構目立ち、シャフトに取り付けるストッパーの穴径も、プリント出力の設定やフィラメントの違いによっても微妙に変わります。
多少の誤差があっても動きに影響しないように、寸法をゆるめに設定しますが、場所によってはきっちりはまらないと困る部分もあり、設計寸法を微調整してプリントし直したりすることもありました。
- また、樹脂を積層して作る3Dプリントを力のかかる機構部品に使おうとすると、積層方向による強度の違いが無視できなくなってくるので、設計のときはプリントの向きを想定しながら部品の形を決めます。
構想
- 今回は、モデルの動きをより複雑なものにします。少しずつ寸法を変えた部品を複数並べて、上下動しながら滑らかに開いたり閉じたりする動きにしました。両サイドに突き出た8本足を持つクモのような形です。
- 今後、バリエーションを増やしやすくするために、共通に使える構造を意識しました。台座の上に板を立てて、その板上に動く本体を取り付ける基本構造にしました。その一部分、本体部分やベースプレートの形/装飾などを変えて種類を増やしていきます。
- 透明アクリルパネルに下からLEDの光を通すような市販の装飾置物もありますので、今回はそこに動く部分を追加したようなものになります。
- 部品作りでは、軸部品に市販のアクリル丸棒を使ってみます。断面が滑らかな円になり、太さも一定になるので、モデルの動きがスムーズになることが期待されます。
それ以外のストッパーやスペーサーなどは従来どおり3Dプリントで作成します。
- さらに、軸に通す部品の位置合わせ用に、PTFE(フッ素樹脂)チューブを使ってみます。たまたま白ではなくて透明のPTFEチューブがあることを知ったので、使ってみます。
設計
各部品の設計(Fusion360)は、本体の機構部分(含ベースプレート)と、LEDを仕込む台座に大きく2つに分かれます。これらは取り外しもできるように、はめこんで固定する構造にします。
本体(機構部分)
- 本体は、胴体とそこから伸びる8本足に、モーターの動きを伝えるクランクとリンク棒、ベースプレート上の固定軸で構成されます。
- モーターの回転運動は、クランクによって、スリットがついた胴体を上下動させます。胴体上の軸に接続された8本の足は、ベースプレートに固定された軸によって、弧を描くような動きをします。
- 一通り部品ができたら、Fusion360のアニメーション機能で動きをシミュレーションして確認しながら、部品やスロットの形・長さを調整して全体の動きとデザインを詰めていきます。
- 部品を止めるための接続部品は、同じファイル内に1個ずつ作りますが、モデルの本来取り付けるべき場所には配置していません。数も多いし面倒なためです。全体の動きを確認する上では特に不都合はありません。
- 設計の手順は、
- 1枚のスケッチ上に、ベースプレート、動く本体、回転軸を描画。
- 高さの異なる部品ごとに、押し出し(オフセット)でスケッチから立体化。
- 動かす部品同士にジョイントを設定し、アニメーションで動きを確認。
- 必要に応じて部品の形や寸法をスケッチから修正。
- 設計が出来たら、レーザーカット用に各部品の形をSVG画像に出力。




台座(LED組込み部分)
- 台座は、5mm厚のアクリル板を3層に重ねています。各層の内側の形状を変えて、モーターやLEDの取り付け場所を作ります。台座そのものは目立たせたくないので、1層目は不透明の黒、2,3層は有色(茶)透明の板を使いました。
- モーター(ギヤボックス)は、台座の1層目に外寸ピッタリの四角の穴を開けて、そのくぼみにはめ込みます。
- LEDの照明は照らす場所によって2系統あります。一つは台座に立てるベースプレートに断面から光を送り込むLED(①)、もう一つはベースプレートから空中に突き出した動く本体部分を下から照らすLED(②)の2種類です。
この2つの色を変えてみると、動くモデルとその背景が色分けされて、モデルが効果的に浮かび上がります。
- LED(①)は、なるべく多くの光をベースプレート内に送り込むのが大事です。そのため、複数個のLEDをプレートの直下に一列に配置します。電源12Vの制約とLEDの仕様から、今回は3個にします。
- LED(②)は、真ん中に1個、動く部分の直下に配置します。光をさえぎらないように、かつ直接LEDが目に入らないように、台座のLEDの周囲には楕円形に穴を開けます。各LEDの仕様書に散光の角度が載っていますので、それを参考にして楕円のサイズと形を決めます。
- LEDそのものが直接見えないように、LEDは台座の中程の位置(2層目)に取り付けます。
2層目については、LEDの光を導く部分(導光部品)を別部品にして、そこだけ半透明のアクリル板を使いました。前回のオートマタで、半透明の部品を試したところ、光が均一に広がって効果的だったためです。
導光部品の側面を波打たたせているのは、光が一箇所に集中しないように乱反射を狙ってです(効果の程はよくわかりませんでした)。
また、モーターのギヤボックスの外装が透明プラスチックだったので、こちらにも光が回り込むようにモーターの下まで導光部品を伸ばしました。
- 3層目は、LEDの配線が無理なく取り回せる程度に空間を確保します。LEDの足から伸ばした電線は、後方から外に出します。LEDの電流制限抵抗は、後で明るさの調整をしやすくするために、外に出した電線の途中に付けました。
- 台座の設計は、部品間の関係には注意が要りますが、本体に比べれば作業は単純です。
- 台座の各層用に高さを変えて構築平面を3枚設定。
- 基本となる1層目の外形スケッチを各平面にコピーし、各層で異なっている部分を追加編集。
- 各層の厚み分の押し出しで立体化。
- はめ込み式にするベースプレートを差し込む穴を切り取り(結合/切り取り)で作成。
- それぞれの部品の位置関係と、それぞれの役割に応じた必要なスペースが確保されているかを確認。





材料・パーツ
アクリル部品(アクリル板)
 前作と同じで、3mm、5mm厚のアクリル板からレーザー加工機で部品を切り出して作ります。
前作と同じで、3mm、5mm厚のアクリル板からレーザー加工機で部品を切り出して作ります。
- Fusion360で作成した3Dモデルから平面のSVGファイルを作成、Inkscapeに取り込んだら、円が長円に変形する不具合が発生、仕方ないのでIllustratorに読ませてレーザー加工データを作成しました。
- 今回の部品は小さくて数が多いので、取り付けを間違わないように、切断後順番に並べてそのままテープで仮止めしておきます。
アクリル部品(アクリル丸棒)
 技術的な面では今回一番注目していたのが、このアクリル丸棒の使用でした。結論は十分以上に使える材料でしたので、今後も活用していこうと思います。使う上での注意点やポイントといったところもいくつか見えてきました。
技術的な面では今回一番注目していたのが、このアクリル丸棒の使用でした。結論は十分以上に使える材料でしたので、今後も活用していこうと思います。使う上での注意点やポイントといったところもいくつか見えてきました。
- Φ3.0mmのアクリル丸棒で販売されているものを調べてみました。もう少し太いのが主流のようですが、いくつか見つかりました。
販売サイトのレビューを見ていると、寸法の誤差によって穴に入らなかったというものがあり、今回使う上でも穴に差し込むので寸法精度が一番のポイントになります。もし穴に入らない場合、穴を広げるか、部品の作り直しが必要になります。
注文したらすぐ発送できるところから、お試しで少量購入してみました。購入した1mの丸棒の両端と真ん中の直径を測ると、どれも3.0mmで精度は問題なさそうです。

PTFE(フッ素樹脂)チューブ
 3Dプリンターのプリントヘッドからエクストルーダーの間のフィラメントのガイドに使われたりしている材料です。多少は柔らかさもあって、自己潤滑性もある材料なので、スライドする部品を支えるのにはいいのではないかと思います。
3Dプリンターのプリントヘッドからエクストルーダーの間のフィラメントのガイドに使われたりしている材料です。多少は柔らかさもあって、自己潤滑性もある材料なので、スライドする部品を支えるのにはいいのではないかと思います。
- 今回買ってみたのはPTFEチューブの透明のもの(内径3.0mm)で、これを切ってシャフトに通し、長めのスペーサーとして使います。短いスペーサーも作れるはずですが、そちらは作業がしにくそうなので、何か治具を作ったほうがよさそうです。
- シャフトに通した部品を一定の位置に支えておくために使います。3Dプリントで作ってもよいのですが、市販のチューブのほうが穴の内径が均一なので良さそうに思えます。
- また、購入時丸く巻かれていたため、しばらく伸ばして垂らしておきましたが、端の方は巻き癖が取れないですね。シャフトにうまく通る内径だったので多少の曲がりは問題ないです。
- 切断は、できるだけ同じ長さになるように定規を当てて、カッターナイフで切りました。
3Dプリント部品
 前作オートマタで使用した接続部品と同様の、各パーツ同士を接続するための部品(ストッパー、ワッシャ)です。今回の寸法に合わせて再設計しました。
前作オートマタで使用した接続部品と同様の、各パーツ同士を接続するための部品(ストッパー、ワッシャ)です。今回の寸法に合わせて再設計しました。
- ここで使う接続部品は、きつい部品同士をはめ込んで固定するもので、取付時には大きな力がかかります。
3Dプリントで使うPLAは、アクリルよりは柔らかいので、大きな力をかけても欠けたりしにくいです。さらに、メタリックな色のフィラメントに使われているシルクPLAと言われるものが、繊維方向には強靭で、容易に切れたりせずに向いています。
- 複数個プリントすると、使えるもの/使えないものがどうしても出てきますので、多めに作って、形の良いものから使用します。
モーター(ギヤボックス)
 前回と同じ、小さく収まり減速比が大きいタミヤのミニモーター低速ギヤボックスを使いました。
前回と同じ、小さく収まり減速比が大きいタミヤのミニモーター低速ギヤボックスを使いました。
- タミヤのギヤボックスを組み立てる際は、同梱のグリスをギヤの噛み合う部分に塗りながら組み立てますが、小さな容器から出るグリスは量の調整が難しく、塗りにくい上にあちこち触ってケースもべたべたになってしまいます。
爪楊枝のような細いものを使って必要なところだけにグリスを付け、噛み合うギヤは片方に塗っておいて、組み立て中にギヤを回してもう一方にもグリスをなじませるのが良いと思います。
LED照明モジュール
PLCコントローラー側から給電して、LED4個(前1個、後3個)を点灯させるモジュールを作成します。組み立てた後からLEDの明るさを調整できるように、電流制限抵抗は外に出しておきます。
- 照明には2色のLEDを使いますが、何色が良いか、仮組み状態のモデルにに色々なLEDを付けて点灯してみました。1色はキャンドル風に光がゆらめくLEDを使います。もう1色は、パステルカラーLEDというのを何色か買ってあったので、それを試します。どちらも秋月電子通商から買ったものです。
テスト点灯は、ブレッドボード上にLEDを配置して、電流制限抵抗を配線し、仮組みしたモデルをその上に乗せて行いました。



前側をキャンドル風LEDの黄色、後側をパステルカラーLEDの各色で色の感じを確認しました。良さそうな組み合わせがいくつかあったので、今後色違いのモデルを作ってもよさそうです。















- 最終的に、使用するLEDは、テストとは逆ですが、モデルを照らす前側をパステルカラーLEDの水色、ベースプレートを照らす後ろ側をキャンドル風LEDの黄色に決めました。
- LEDは、極性を間違えて高い電圧をかけると壊れるので、足を切ってもすぐわかるように、事前にLEDのカソード側の足の根元にマジックで黒く印をしておきます。
- 導光部品の取付穴にLEDを差し込んで、LED同士は足を曲げて形を整えてはんだ付けします。台座の3層部分の高さ5mmの空間に納めるので、足はLEDの根本に近いところから横に曲げる必要があります。
一方、外に引き出す電線は、被覆のあるもの(取り回ししやすいので、シリコン被覆の柔らかい電線を使いました)を使います。




 電流制限抵抗は、ユニバーサル基板を小さく切ってその上に組み立てます。
電流制限抵抗は、ユニバーサル基板を小さく切ってその上に組み立てます。
LED①とLED②の2系統の明るさをそれぞれ可変抵抗で調整出来るように配線します。間違えて絶対定格以上の電流を流さないように、固定抵抗と可変抵抗を直列につないだ構成にして、抵抗が一定以上には小さくならないようにします。

組み立て
本体は組み立ての時に力を入れる箇所が幾つかあるので、その際に部品をこわしてしまわないように注意します。台座は粘着剤が部品の表面を汚さないようにマスキングテープで保護します。
本体
 上述のアクリル丸棒の接着にはかなり気を使いました。部品同士のガタツキはそれほどなかったので、接着剤が不要なところに垂れないことに一番気を使って接着しました。
上述のアクリル丸棒の接着にはかなり気を使いました。部品同士のガタツキはそれほどなかったので、接着剤が不要なところに垂れないことに一番気を使って接着しました。
接着後触ってみたところ、3本のシャフトが固定されていません。接着剤がシャフトの断面上に留まったままで、隙間に流れていかなかったようです。再度作業を行って全部接着できました。
余分な接着剤がベースプレートに付いてしまった箇所もありました。ここはコンパウンドを付けて平らに研ぐことできれいに修正しました。

- 接着したシャフトにスペーサーやワッシャ、本体や足部品を通して、最後に端に抜け防止のストッパーをはめ込みます。ここは力で押し込んでゆくのですが、強力に接着したとはいえ、シャフト以外の部品に力がかかると接着部分が破損する可能性があります。
そこで力をかけるシャフトの反対側の端にピンポイントで力を受ける台を当てて、シャフト以外のところに力がかからないようにして押し込みます。
前作の1号機でも、シャフトへのはめ込み用の治具を作って組立に使いましたが、こちらでも必要だなと思いました。
台座
- 後ではがすことも出来るシリコン粘着剤で3枚のアクリル板を接着して作ります。粘着剤を使用する量と硬化までの固定がポイントです。なるべく少量で、それをを広げて全体に行き渡らせるように固定時に圧をかけます。ただし力をかけると大抵ずれるので、位置がずれないようにすることが一番重要です。
- 粘着剤のはみ出した分は、こするとはがせるので、固まった後からはがします。だたし広い面にくもりのように薄く付いたら、なかなか取れなくなってしまうので、あらかじめマスキングしておいたほうがよいです。
LED照明部分
- LEDを配線した部品を、粘着剤を使って台座の導光部品に固定します。粘着剤は透明ではありますが、LEDの発光する部分は避けて下の方だけに付けて穴に固定しました。
- 配線の取り回しを調整します。引き出す電線がバラけるので、台座から出るあたりでテープでまとめておきます。
全体の組み立て
 ベースプレートを台座に差し込み、モーターのギヤボックスを台座の四角穴に固定します。このとき、ギヤボックスのシャフトがペースプレートの穴を通るように固定位置を微調整する必要があります。
ベースプレートを台座に差し込み、モーターのギヤボックスを台座の四角穴に固定します。このとき、ギヤボックスのシャフトがペースプレートの穴を通るように固定位置を微調整する必要があります。
ギヤボックス内のシャフト固定ネジを一旦ゆるめて位置決めを行い、クランクを取り付けたらネジを締めます。
 モーター(ギヤボックス)軸とアクリルのクランク部分は差し込んでいるだけです。
モーター(ギヤボックス)軸とアクリルのクランク部分は差し込んでいるだけです。
断面が六角形の金属の軸を、アクリルをレーザーカットした六角穴に差し込んで、回転を伝えますが、実際に組み合わせてみたらゆるゆるでした。回すことはできているので、少しでもきつくなるようにアクリル専用接着剤を穴の内側に塗っておきました(あまり変わりません)。

 後は固定するのに使った粘着剤が硬化すれば出来上がりです。
後は固定するのに使った粘着剤が硬化すれば出来上がりです。

テスト運転
モーターとLEDに電源をつないで、設置前の最終テストです。モーターは、本番と同じモータードライバー基板経由でつないでいます。
- 本体の動く部分の様子を見てみると、回転にきつい部分があります。胴体を上に持ち上げるときのモーターの音が明らかに苦しそうです。このへんはCADソフトのシミュレーションを見ていてもわかりません。
 組み立て完成後の最終テスト:モーターによる各部の動きも問題なく、LEDの照明も2色とも明るくついています。
組み立て完成後の最終テスト:モーターによる各部の動きも問題なく、LEDの照明も2色とも明るくついています。

展示
PLCへの組込み
- 前作の自転車をこぐオートマタは2台で展示していましたので、今回はそのうちの1台と置き換えます。コネクターは共通なので、つなぎ替えるだけでいいのですが、コントローラー側の内部配線の変更が必要となります。
前回コントローラーのデジタルOUTの数が一つ足りなくなり、アナログOUTを準用して対応していたので、配線が他のものと異なっています。今回はその分を新型をつなぐのに使います。
- 前のモデルはLEDの電流制限抵抗をPLCコントローラーのケース内に配線していましたが、今回のはモデルの近くに設置しています。前の電流制限抵抗部分をバイパスして、ケース内の配線を変更しました。
- 自動運転のPLCプログラムは、そのままでもよいのですが、もう少し展示物が目立つように、展示スペース全体の人感センサーから信号が入ったらLEDが点灯するように変更しました。モーターを回すのは、従来どおり個別の非接触スイッチがONになったときです。
ラダープログラムの便利なところで、従来のオートマタ用のプログラムに人感センサーからのスイッチの線を1本追加してやるだけで対応できます。実際には、さらに横着して、一緒に点灯する別のLED照明の出力コイルの内部スイッチからつなぎました。これで従来の非接触スイッチからの指示と人感センサーによる指示のどちらに対してもLEDが点灯します。
さらに点灯時間についても微妙に長くなるように見直しました。


展示スペースへの設置
出来上がった2号機を、展示スペースに持ち込んで、自動運転のシステムに組込みました。
- 一通り設置を終えて、修正した自動運転のPLCプログラムを登録し、動かし始めました。
なぜか2系統あるLEDのうち、ベースプレート側(LED3個)が点灯しません。もう一方の前側(LED1個)は問題なくついています。
- 不完全ながらも一つは点灯するので、一旦その状態で展示を開始し、後日不具合対応をすることにしました。



不具合対応
- 点灯しない原因で思いつくのは、
1.LEDが壊れたかも。直列につないでいるので1個が壊れれば他の2個もつかなくなります。
2.配線が切れたかも。ただし別の1系統は問題なく点いているので、切れたかもしれない箇所はもう片方に固有の箇所ということになります。事前テストではついていたので、いきなりそこだけが切れたり壊れたりというのも考えにくいです。
- キャンドルLEDは順方向電圧VFが3.3V(2.5~5.0V)なので、3個直列にして9.9V(7.5~15.0V)で、供給する電圧(12V)が足りなくなっているのでは?
同じ種類のLED(キャンドル風LED)3個を直列にして別途点灯実験をしてみました。全体に供給する電圧を12Vから下げていきましたがずっとついています。6Vでもなんとか点灯しています。これでもなさそうです。
- PLCのアナログOUTの出力電圧を測ってみたところ、10Vしかありません。12Vの電源が供給される前提でいたので、電圧不足が原因でしょうか?UniPi1.1の仕様を確認してみると、アナログOUTは0~10Vの範囲でのPWM出力とのことでした。ただし10Vに満たなくとも実験では点灯したので、これも当たらなそうです。
- キャンドル風に光が変化するLEDの詳細はデータシートにも詳しく書いていないですが、中に明るさを制御するICが入っているとしたら、アナログOUTからのPWMの断続的な電源供給ではICが動作ができないのではないかと思いつきました。PLCプログラム上ではアナログ出力を100%に指定していますが、実際のPWM出力の電圧が連続しているとは言い切れないのではないでしょうか(きちんと確認はできていません)。
 そう思ってキャンドル風LEDを使った今回の2号機に連続供給できる電源を割り当てるべく、オートマタ1,2号機の接続を入れ替えてみたところ、今度は両方のLEDが点くようになりました。めでたしめでたし。
そう思ってキャンドル風LEDを使った今回の2号機に連続供給できる電源を割り当てるべく、オートマタ1,2号機の接続を入れ替えてみたところ、今度は両方のLEDが点くようになりました。めでたしめでたし。
1号機は12Vから10Vに供給電圧が下がったので、電流が減って明るさが減少しましたが、今回は新型の2号機のお目見えなので、そっちの方が目立ってしかるべきです。

感想
 完成して実際に動くのを見ていると、当初の構想よりもきれいで見ていて飽きません。
完成して実際に動くのを見ていると、当初の構想よりもきれいで見ていて飽きません。
しばらくこのシリーズを展開させていこうと思います。- 動く様子は動画にもまとめました。

今後の対応
- 今回作成した照明台座付きベースプレートに別モデルを載せるやり方で、バリエーションを増やしていきたいと思っています。モデルを動かすことが必須ということでもないので、光らせ方の方を色々追求するのも面白そうです。
- PLC(UniPi1.1)のアナログ出力のところでつまづいたので、使い方を再確認しておきます。この先、強弱をコントロールした展示物を作りたいと思っていますので。ただしそのときは、アナログ出力の数が多い別のコントローラーを使おうと思います。